Individual Differences and Bio-Inspired Design of Vehicle Group Dynamics
This project is with collaboration between Georgia Tech, Princeton University, and the Max Planck Institute. The project is sponsored by the Office of Naval Research (ONR).
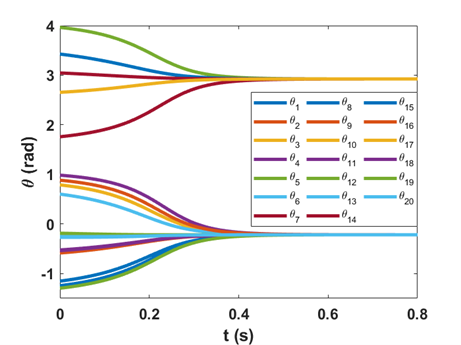
Opinion dynamics on the sphere
Our previous work has integrated a PCA unsupervised learning algorithm with the Speeding-Up and Slowing-Down (SUSD) strategy for source seeking. Detailed information can be found at Al-Abri et al. (2018).
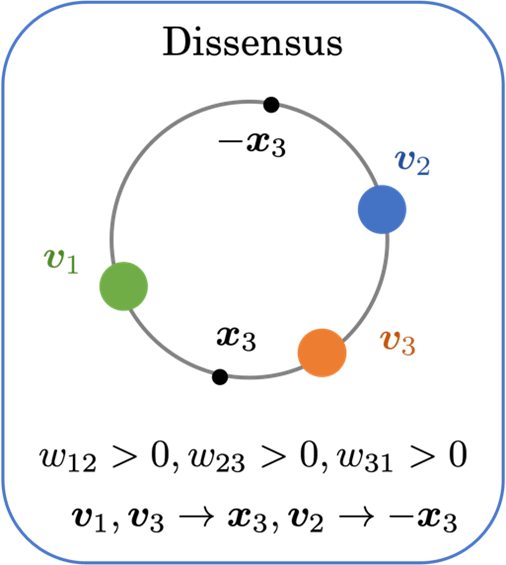
Inspired by this, we propose novel dissensus algorithms based on the Oja principal component analysis (PCA) flow to model opinion dynamics on the unit sphere. The information of the covariance formed by the opinion state of each agent is used to achieve a dissensus equilibrium on unsigned graphs. This differs from most of the existing work where antagonistic interactions represented by negative weights in signed graphs are used to achieve a dissensus equilibrium. The nonlinear algorithm is analyzed under both constant covariance and time-varying covariance leading to different behaviors. Stability analysis for the unstable consensus and stable dissensus equilibria is provided under various conditions.
- Ziqiao Zhang, Said Al-Abri, and Fumin Zhang, ”Dissensus Algorithms for Opinion Dynamics on the Sphere ”, 2021 IEEE Conference on Decision and Control (CDC).
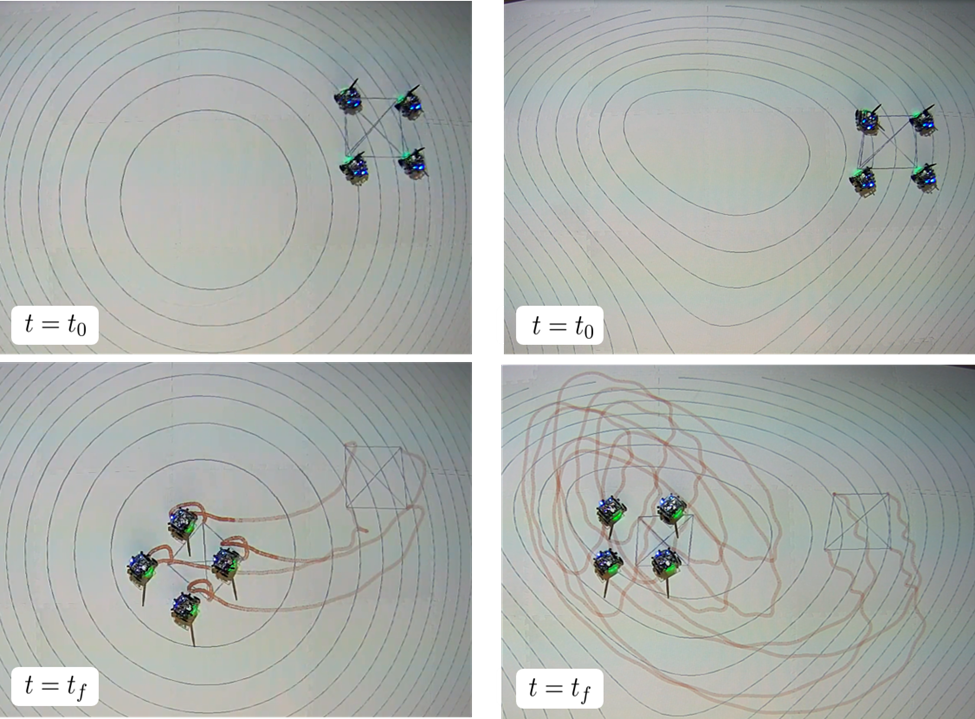
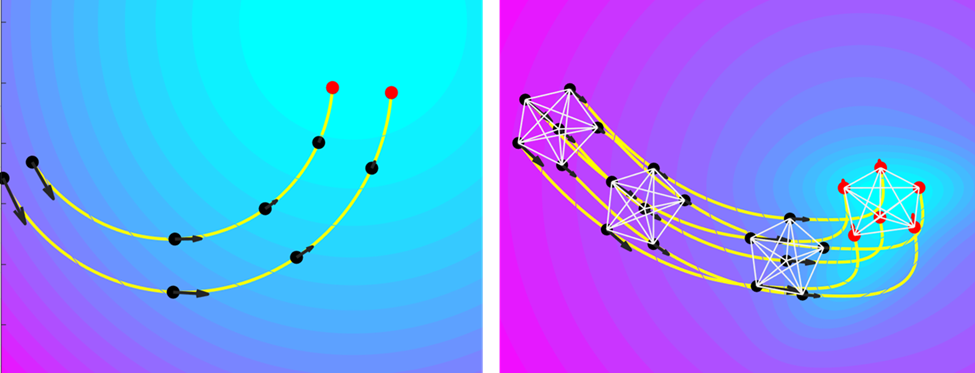
A Distributed Active Perception Strategy for Source Seeking and Level Curve Tracking
An important problem in swarm robotics is the deployment of multiple robots in order to achieve source seeking or level-curve tracking behavior in a scalar field. In source seeking problems, agents are tasked with finding the location that minimizes or maximizes the scalar field while in level-curve tracking, agents are tasked with tracking a trajectory that achieves a constant field value. The field can represent environmental characteristics such as chemical concentrations, light intensities, or heat. We proposed a distributed active perception strategy that enables swarms of various sizes and graph structures to perform source seeking and level curve tracking without the need to explicitly estimate the field gradient or explicitly share measurements. The proposed method utilizes a consensus-like Principal Component Analysis perception algorithm that does not require explicit communication in order to compute a local body frame. This body frame is used to design a distributed control law where each agent modulates its motion based only on its instantaneous field measurement.
- Al-Abri, Said, and Fumin Zhang. “A Distributed Active Perception Strategy for Source Seeking and Level Curve Tracking.” IEEE Transactions on Automatic Control (2021).
- Al-Abri, Said, Wencen Wu, and Fumin Zhang. “A gradient-free three-dimensional source seeking strategy with robustness analysis.” IEEE Transactions on Automatic Control 64.8 (2018): 3439-3446.
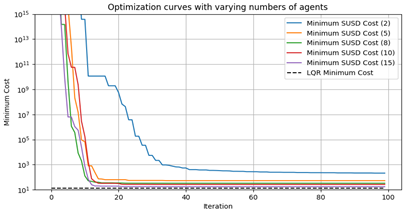
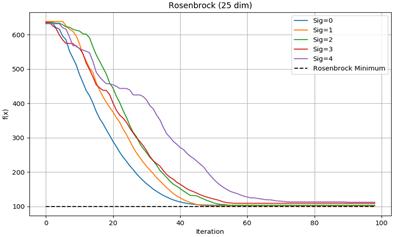
SUSD Derivative-Free Optimization Algorithm
In this work, we leverage a modified version of the decentralized bio-inspired source-seeking strategy known as Speeding-Up or Slowing-Down (SUSD) as a sample-efficient derivative-free solution for optimization in scenarios where the gradients may be ill-defined, i.e. vanish or grow to infinity. Our main contributions are: i) generalizing SUSD as a derivative-free optimization method for general functions defined in a Euclidean space of arbitrary dimensions, ii) proposing a novel exponential mapping of the objective function that allows for the application of the SUSD algorithm to a wide variety of optimization problems with ill-defined derivatives such as vanishing or exploding gradients, iii) deriving the SUSD optimization dynamics, and stability and robustness analysis under both linear and exponential objective function mappings, and iv) obtaining empirical results for solutions to the data-driven LQR problem when the system is inherently unstable and comparisons with the NPG. In addition, we provide empirical evidence that our approach is robust to noisy evaluations of the function by optimizing a high dimensional classical nonconvex test function (Rosenbrock) where function evaluations are perturbed by Gaussian noise.
- Al-Abri, Said, et al. “A derivative-free optimization method with application to functions with exploding and vanishing gradients.” IEEE Control Systems Letters 5.2 (2020): 587-592.
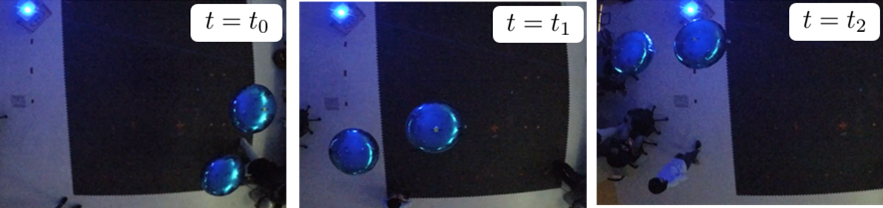
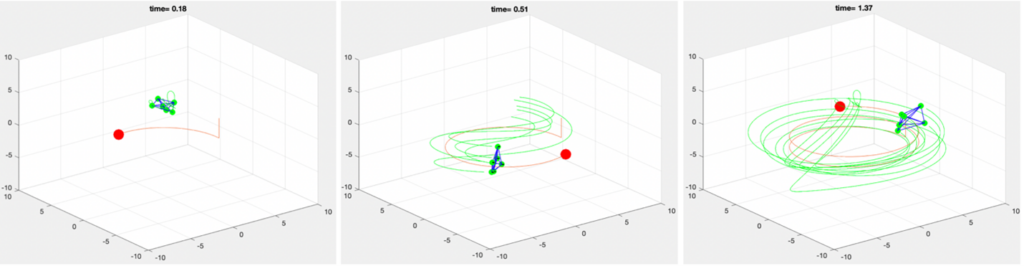
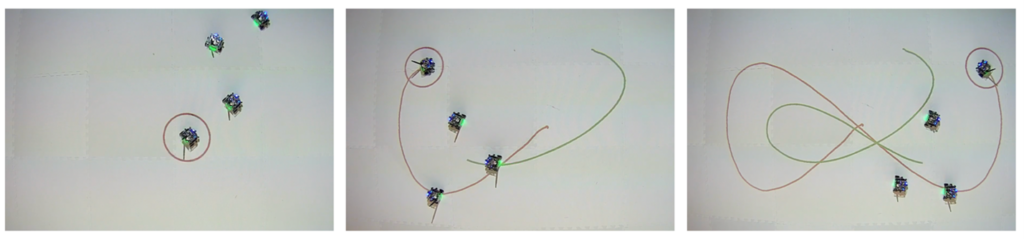
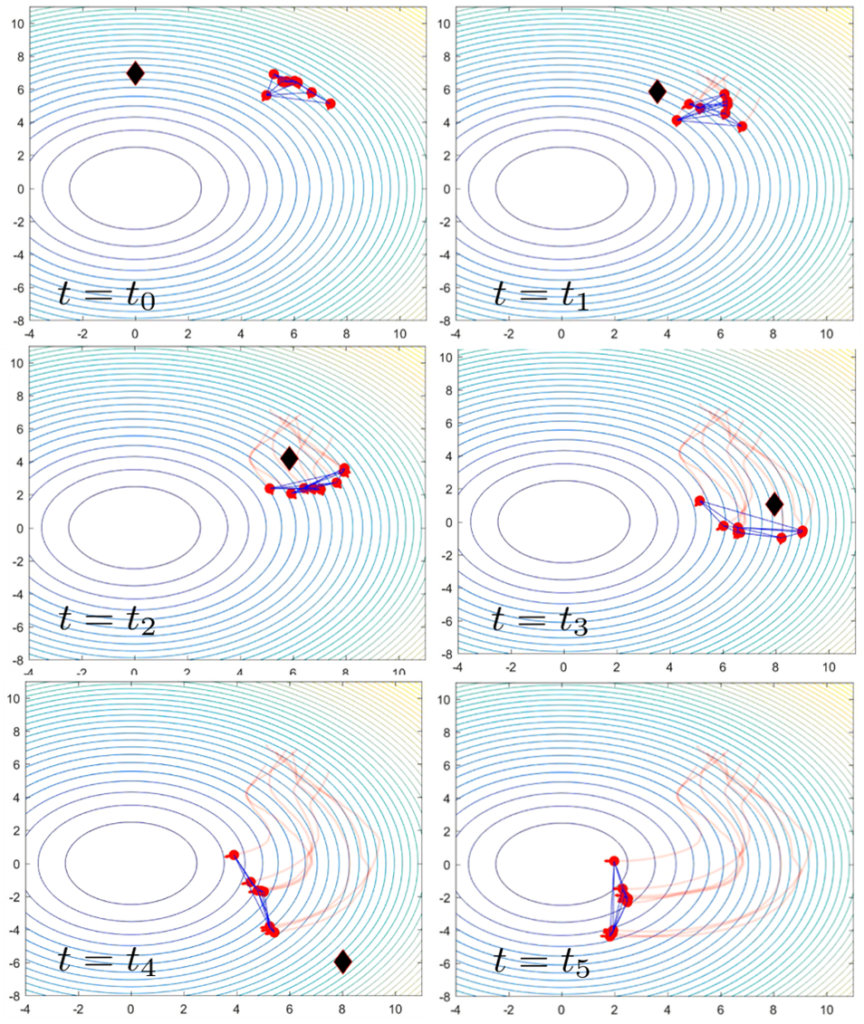
Distributed Active Perception for Multi-Agent Target Tracking
We consider a swarm of agents where at each instant of time each agent is able to capture an image about a target moving with unknown dynamics. The problem is then to design a distributed control law so that the swarm detects and tracks the target. A challenge we consider is that the agents have limited communication resources and thus cannot communicate images. Our solution consists of two main steps. The first step is to design a mapping function that transforms the high-dimension image information into a low dimension scalar cost function. The second step is to design a control law to optimize the perception-based cost function. To design a perception mapping function, we consider an object detection function that is able to draw a box around a known or unknown target in the image frame. From the points of this box, we design a cost function that is optimal when the target is completely contained in the box. Our method aims to leverage existing AI-based learning algorithms of object detection. However, the challenge is optimizing a black-box cost function where most likely we don’t have an analytical form of the perception function. We leverage our previous derivative-free SUSD optimization algorithm to solve this distributed optimization problem. We applied the derivative-free distributed SUSD algorithm to the image-based perception objective function to track the moving target. Through SUSD, the swarm is able to optimize the time-varying cost function, and hence track the target, without requiring knowledge of the analytical form of the cost function.
- Al-Abri, Said, et al. “A Derivative-free Distributed Optimization Algorithm with Applications in Multi-Agent Target Tracking.” 2021 American Control Conference (ACC). IEEE, 2021.
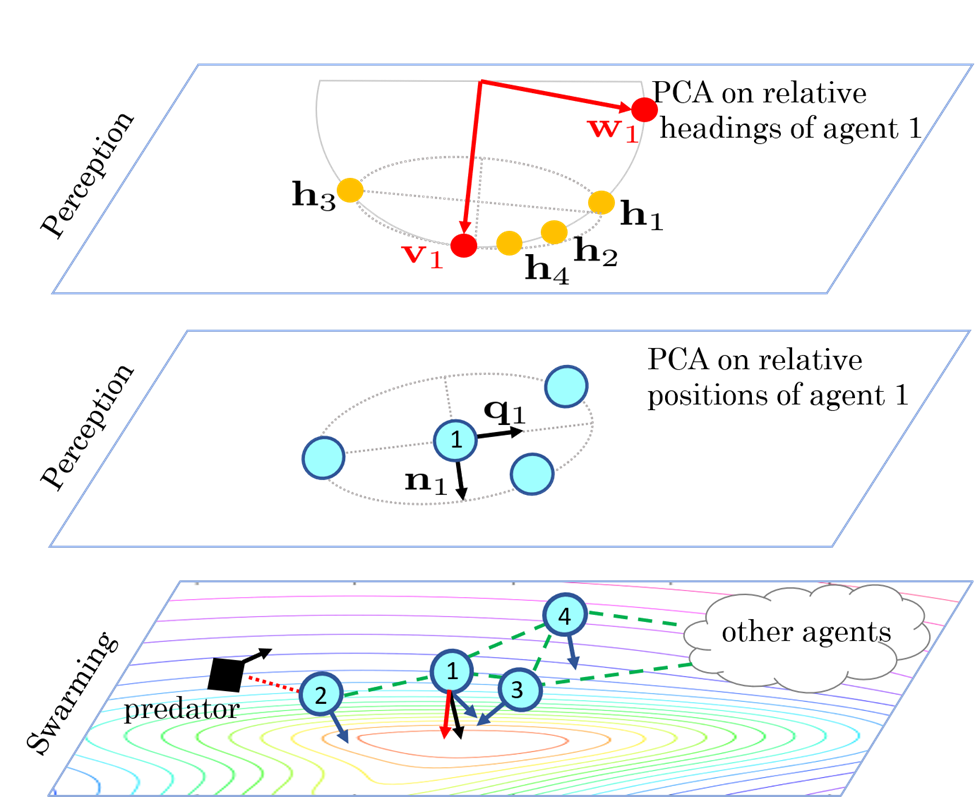
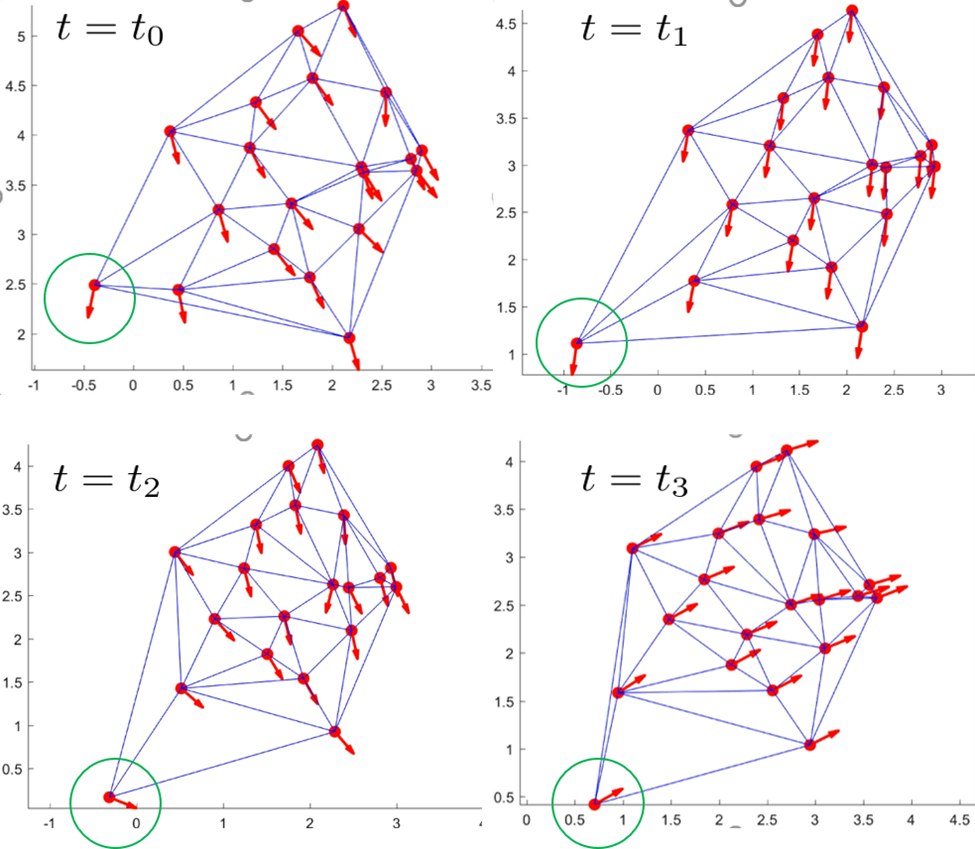
A Multi-Layer Swarm Control Model for Information Propagation and Multi-Tasking
While individuals in natural swarms are collectively performing complex tasks such as foraging or synchronization, critical information such as predator warnings propagate across the swarm almost instantly and presumably without explicit communication between the individuals. We propose a multi-layer control model composed of an interplay of decentralized algorithms for perception and swarming. In the perception layer, each agent applies a Principal Component Analysis (PCA) on the relative positions and headings of its neighbors to learn principal properties about the geometry and motion of the surrounding agents. These principal values are then used in the swarming layer where a distributed control law is designed to balance between achieving a collective task and at the same time allowing critical emerging signals to propagate to the entire swarm. Through this novel model, we demonstrate implicit information propagation and multi-tasking in swarms using only local interactions and without explicit communication or prescribed formations. The proposed model has the potential to be used in various applications such as designing tactics for a swarm of drones to avoid or chase a malicious agent.
- Al-Abri, Said, Sean Maxon, and Fumin Zhang. “A multi-layer swarm control model for information propagation and multi-tasking.” 2019 American Control Conference (ACC). IEEE, 2019.
A Bio-Inspired Localization-Free Stochastic Coverage Algorithm with Verified Reachability
Dependence on constant availability to an external localization service is often unreliable and infeasible in mobile robots. In this work, we take inspiration from a continuous fish motion model, the Persistent Turning Walker (PTW), to devise a strategy which is able to achieve 2D and 3D coverage in an unknown environment in the absence of a localization service, such as a Global Positioning System (GPS). This is achieved by converting the continuous-time dynamical system into a Discrete-Time Markov Chain (DTMC) which is then shown to exhibit strongly connected properties that are verifiable through numerical methods. The aforementioned proposed framework can also be used to study the continuous-time dynamics of other biological systems and evaluate their properties. The performance of the PTW model is also compared with two existing random search strategies, Simple Random Walks (SRW) and Correlated Random Walks (CRW) by using analytical bounds, simulation results, and statistical tests. The simulation results show that the proposed PTW algorithm covers a given search-space at a faster rate compared to the CRW and SRW models. Hence, the PTW may be effectively used as a coverage strategy by mobile robots in underwater or underground environments where the availability of a GPS cannot be guaranteed at all times.

- Khan, Ayesha, et al. “A bio-inspired localization-free stochastic coverage algorithm with verified reachability.” Bioinspiration & Biomimetics 16.5 (2021): 056009.